




文/新戰略機器人全媒體記者 思且
來自 Tractica 的研究數據顯示,至 2021 年全球倉儲和物流機器人的市場規模將達到 224 億美元,行業整體的未來發展空間廣闊。如何在巨大的市場中分上一杯羹?斯坦德機器人聯合創始人王永錕認為,要想在市場中搶占先機,除了具備核心的技術壁壘,還應該具備兩個方面的能力。其一是具備完善的產品能力,即生產的機器人要穩定可用。其二是具備對于細分行業的理解能力。
目前,斯坦德機器人瞄準了工業場景中的應用潛力,將核心主要放在兩個方面,一是開發SLAM定位、信標定位、慣性導航、運動控制等底層技術;二是在上述基礎之上進行產品開發應用。因此當前其業務模式主要為整機銷售以及提供AGV技術解決方案。

在導航方面,斯坦德機器人采用了SLAM、信標、慣性導航相結合的綜合定位導航方案。通過SLAM技術對環境的學習,機器人自動生成2D平面地圖,機器在運動過程中通過實時位置與平面地圖的匹配,確定當前位置;在此基礎上,通過慣性導航和信標定位可獲取更為準確的位置和姿態信息,從而提升定位導航精度,目前定位精度在±1CM內。
在運動控制系統上,斯坦德機器人研發的核心控制器支持差速、舵輪、麥克納姆輪、全向輪等驅動方式,基本覆蓋所有行業及環境的應用需求,同時每一種驅動形式,都是結合自有不同的運動解算,據有特有的運動控制曲線,以保證機器人運行的可靠性、順滑性、精確性。

創新的FMS軟件系統。斯坦德機器人研發的FMS系統(機器人任務部署及調度系統)。AGV調度系統通過與客戶的 MES/WMS信息交互,獲取搬運任務指令,然后將任務信息分配給調度系統所轄的AGV小車,從而實際貨物的搬運;調度系統實時顯示各AGV的位置信息及任務狀態,便于AGV的監控和管理;調度系統可以同時調度1000臺機器人協同工作,系統兼容不同類型的AGV,實現工廠的集中管理及大規模集群。

產品方面,目前斯坦德機器人在工業搬運方向的產品主要分為兩類——背負式機器人和叉舉式機器人:
其中背負式機器人Oasis 主要滿足工業場景產線之間的物料流通,其承載在100~1500kg、最大速度為2m/s,站點精度在±10mm內;叉舉式機器人Gulf 主要解決工業場景中棧板的搬運與堆垛,其最大速度為1.5m/s,站點精度在±10mm內。
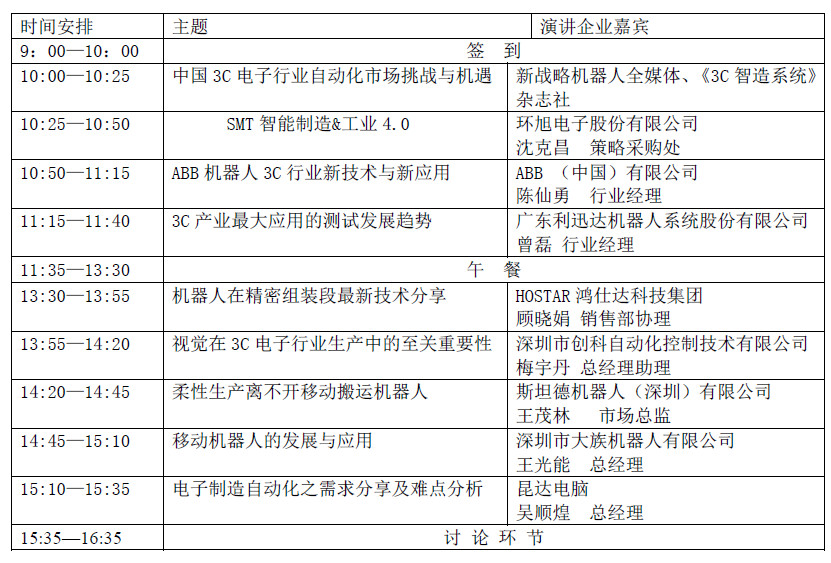
4月25日,新戰略機器人全媒體將在上海世博館舉辦《3C電子制造智能系統發展工程峰會》上,屆時,斯坦德機器人合伙人王茂林將會與大家一同探討移動機器人在柔性生產中的應用,敬請期待!